Maristenschule
Ein Auftrag der Realschule ist es, die Schülerinnen und Schüler auf die Arbeitswelt vorzubereiten. Bezüglich der Industrie steht diese vor dem Umbruch zur Industrie 4.0. Der Bedarf an Fachkräften ist dabei leider viel größer als die Zahl der interessierten Schülerinnen und Schüler für MINT-Fächer. Das geplante Projekt soll dabei helfen, das Interesse zu wecken und über das Thema Industrie 4.0 zu informieren. Im Rahmen von freiwilligen Workshops sollen die Schülerinnen und Schüler der Jahrgangsstufen 9 und 10 die Möglichkeit erhalten, etwas über die Arbeitswelt von morgen - Industrie 4.0 - zu erfahren. Hauptelement der Workshops soll allerdings die Programmierung eines Roboterarms sein. Für die Programmierung soll ein Arduino-Mikrokontroller genutzt werden. Der Vorteil ist dabei, dass Schülerinnen und Schüler die freie Software auch zuhause nutzen können. Die Roboterarme sollen auch in den nächsten Jahren für entsprechende Workshops zu Verfügung stehen aber auch im Rahmen des Technikunterrichts genutzt werden. Dort ergänzen sie das im letzten Schuljahr konstruierte Fließband.
Ziel des Projektes ist es, mit Hilfe eines programmierbaren Roboterarms das Interesse von Schülerinnen und Schülern am Thema Industrie 4.0 zu wecken. Es besteht die Hoffnung, die Zahl derjenigen zu erhöhen, die sich nach der Realschule für eine berufliche oder schulische Ausbildung im Bereich der Mechatronik, Digitaltechnik oder Informatik entscheiden.
Die Roboterarme sollen zunächst von den Schülerinnen und Schülern der Technik-AG aufgebaut und in Betrieb genommen werden. Dort sollen auch die ersten Beispielprogramme entwickelt werden. Sobald diese Schülerinnen und Schüler sicher mit den Robotern umgehen können, werden Workshops angeboten. Bei diesen sollen die Schülerinnen und Schüler der Technik-AG als Tutoren eingesetzt werden. Im Rahmen des Technikunterrichts, an dem nur ein kleiner Anteil einer Jahrgangsstufe teilnimmt, werden die Roboterarme in Jahrgangsstufe 10 eingesetzt.
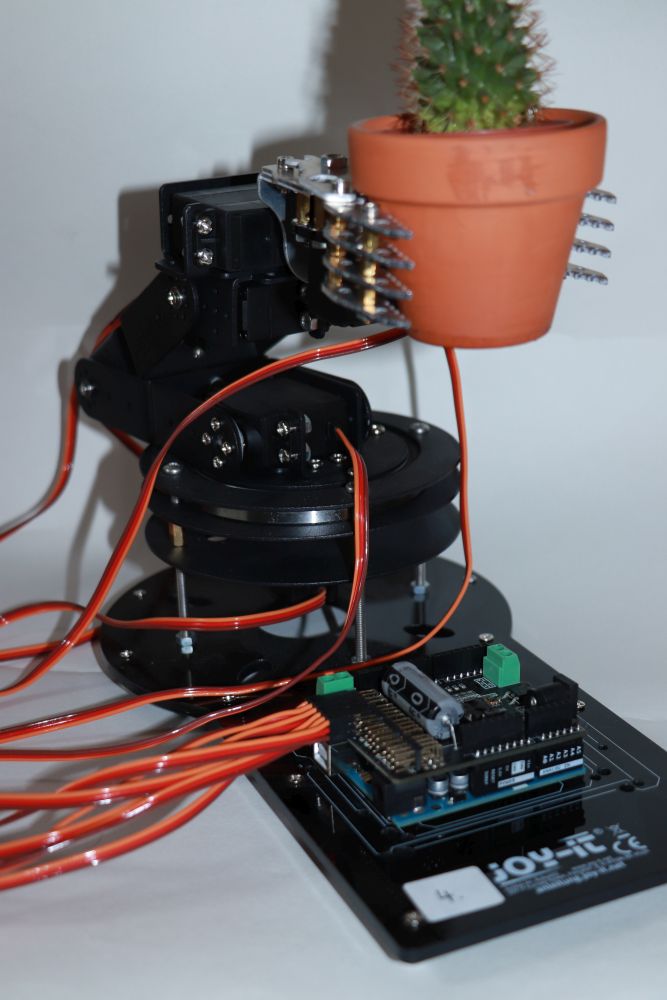
Der Aufbau der Roboterarme stellte sich als viel problematischer dar als zuvor erwartet. Ein Grund dafür war sicherlich die Aufbauanleitung des Herstellers. Einerseits war diese recht detailliert und mit Fotos der einzelnen Arbeitsschritte versehen. Andererseits war häufig nicht genau zu erkennen, welche Schraube für den jeweiligen Arbeitsschritt notwendig war. Ein größeres Problem stellte allerdings die fehlende Erfahrung mit 360°-Servos dar. Die Bezeichnung verleitete zu der Annahme, dass die Einbauposition egal sei. Nach Inbetriebnahme stellte sich aber heraus, dass der Arbeitsbereich der Servos nur 180° ist. Die Servos waren fast alle unter der falschen Annahme ungünstig eingebaut. Die Roboter mussten daher leider noch einmal mühsam zerlegt und neu aufgebaut werden.
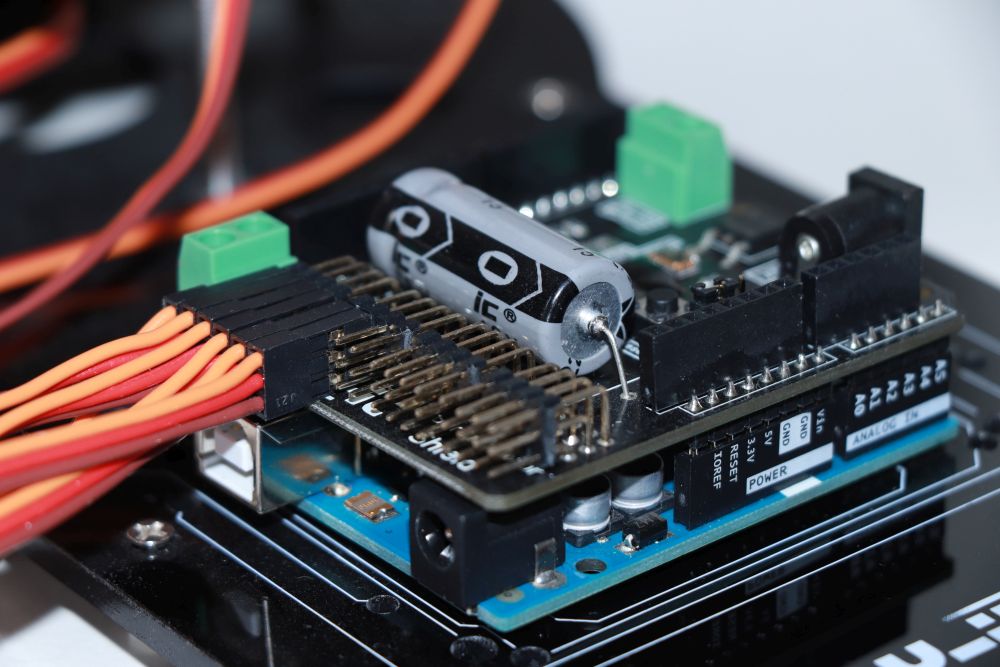
Eine erste Programmierung war dann allerdings mit Hilfe des map-Befehls schnell erledigt. Hierzu wurden dem Roboter für die einzelnen Servos Positionen im Quellcode das Steuerungsprogramms übergeben. Beim Betrieb zeigte sich aber, dass die Positionen des Arms bei Wiederholung nicht genau wiederholt werden. Außerdem lösten sich durch Öffnen und Schließen der Hand immer wieder Muttern, so dass die Hand auseinander fiel. Dieses Problem konnte durch auswechseln der Muttern gelöst werden.
In einem nächsten Schritt wurde der Arm dann mit Hilfe von sechs Potentiometern gesteuert. Das Programm erkennt die Einstellung des Potentiometers und übersetzt diese in eine Position für den Servomotor. Mit Hilfe dieser Steuereinheit ist nun eine Handsteuerung des Roboterarmes möglich.
Die Roboterarme werden in der nächsten Unterrichtsreihe mit einem Förderband zusammen arbeiten. Ziel ist es dann, dass Werkstück mit RFID-Tag, Fließband und Roboterarm Informationen austauschen und je nach Sachlage interagieren.